滚筒式抛丸机自动装卸系统的设计

2018-04-12

5612
摘 要:主要介绍滚筒式
抛丸机自动装卸系统的上料系统的工作原理、卸料机构的基本组成及控帝J原理、液压驱动系统原理、可编程逻辑控制器的逻辑控制原理。滚筒式抛丸机自动装卸系统是一种机电液一体化的机器。它能为降低劳动强度发挥应有的作用。
关键词:抛丸机; 自动装卸系统;可编程逻辑控制器
0 前言
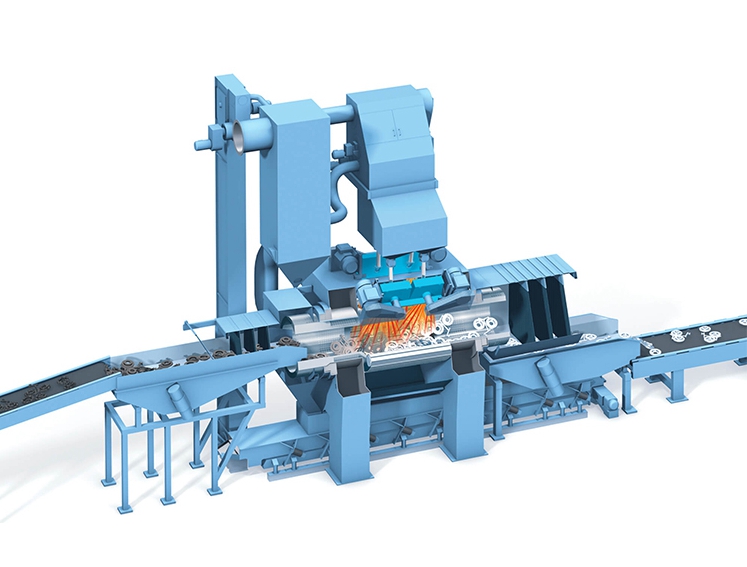
利用Q31101滚筒式
抛丸清理机可清理锻件的氧化铁皮,同时提高锻件的表面质量。由于锻件的批量生产,使用人工操作,劳动量大,工人难以承受,同时也影响了生产效率,势必需用一种机械来代替。
1 抛丸机装卸机构的设计
(1)抛丸机装料机构的设计
抛丸机装料机构由以下部分组成:左右上料油缸、料斗架、料斗及连杆机构,简化的运动简图如图I所示。该机构的工作原理:在装料初始时,左右液压缸以相同速度同时工作,待料斗到达位置口时,右液压缸下降,致使料斗至位置c,然后右液压缸上升,同时左液压缸下降,使料斗以D—E一,一c— 顺序进行工作,较后回到位置B ,由左右液压缸同时下降回到原位,整个工作过程完成。

图1、上料机构简图
(2)抛丸机卸料机构的设计
工作装置由以下部分组成:动臂、斗杆、铲斗、动臂油缸、斗杆油缸、铲斗油缸及连杆机构,简化的计算图如图2所示。

图2、简化计算图
在机座建立坐标系蜀x0y0 z0,在动臂上建立动态坐标系 x1yl z1在斗杆上建立动态坐标系
X2y2 z2,在铲斗上建立动态坐标系 x3y3z3;z1z2z3。 轴通过各回转副的轴线,方向符合右手定则,则各机构的旋转矩阵为

齐次变换矩阵为

式中 Ry——坐标系X1Y1Z1与坐标系X1Y1Z1的旋转变换矩阵;
Ty-----坐标系X1Y1Z1与坐标系X1Y1Z1的旋转变换矩阵;
L1—— 坐标系与原点之间距离。
抛丸机卸料机构工作时,油缸的瞬时长度可以求出,则可以求得a。,a:,a,,由姿态角和油缸长度可以确定工作装置的姿态(位置和姿态)。
2 液压驱动装置的设计
抛丸机自动装卸料机构的动力源主要是液体压力提供的,抛丸机自动装卸料系统的液压驱动系统简图如图3所示。

图3、自动装卸系统液压简图
1.油箱2.滤油器3.油泵4.三位四通阀5.调速阀6.油缸7.溢流阀
A.上料左右液压缸 B.卸料动臂油缸、斗杆油缸、铲斗油缸
为了设计方便,把上料左右液压缸、卸料动臂油缸、斗杆油缸、铲斗油缸的液压驱动系统设计为相同油路。自动装卸系统液压驱动系统的原理:
(1)液压缸进给:液压油由油箱一滤油器一油泵一三位四通阀左位一调速阀一油缸左腔,液压缸右腔的油流回油箱。
(2)液压缸后退:液压油由油箱一滤油器一油泵一三位四通阀右位一调速阎一油缸左腔,液压缸左腔的油流回油箱。当把三位四通阀打到中位时,液压缸停止运动。只要灵活地控制三位四通阀的3个位置,就能够达到设计目的。
3 控制系统软件设计
滚筒式抛丸机自动装卸系统控制系统采用可靠性很强的可控制编程器为核心,对整个系统进行控制,可控制编程器的程序设计采用结构简单、直观、方便的梯形图进行,程序的设计方案,主要根据控制系统流程图(见图4)及控制系统主要功能实现的。

图4、控制系统流程图
4 结语
滚筒式抛丸机自动装卸系统的设计,提高了加工效率,也降低了工人的劳动强度,具有一定的经济效益和社会效益。


 鲁公网安备 37021102001299号
鲁公网安备 37021102001299号